终于到了非常重要的 Inference!
Inference 有两种类型:一个是这章说的 Particle based approximate inference,是用采样的方法来inference (近似估计)概率,是随机化算法。另一个是optimization based inference(精确算出)概率,是确定性算法。
Inference 的共同目标就是给了部分的观测值 E=e,推断目标变量 Y:
- P(Y|E=e)
- (MAP inference)
Inference 的应用场景:
- 疾病诊断,已知病人的一些生活习惯,做的病理检查,和症状(observation E),推测疾病(target Y)
- NER:实体命名识别,已知一段文本(observation E), 推测一个 phrase 是否是一个实体(target Y)
- 图像/语音合成:风格迁移,已知原始图片(observation E),推测出对应每个像素的后验颜色(target Y)
如果直接从联合分布 P 中做推断,用variable elimination 的方法复杂度是 NP-hard。但是我们知道很多 network structure,从而降低了复杂度,有很多高效的近似算法达到很高的推断准确度
Particle-based Approximate Inferences 的基本思想就是从目标分布(联合分布)中采样然后用样本来近似估计目标概率(边缘分布),基本思想非常简单:
所以要如何得到 samples 来估计后验概率 P(x|E=e)?
- Forward Sampling(简单,但费时)
- Likelihood Weighting and Importance Sampling(他俩有异曲同工之妙)
- Markov Chain Monte Carlo Methods(基本是万能的方法,效果也好)
Forward Sampling
就是通过 BN 来生成samples,然后估计概率用
采一个样本 x[m]的过程:
- 定义变量的拓扑排序X1, …, Xn
- 通过 BN 已知的概率P(Xi|pai) 采样每个 Xi ,pai 是前 i-1 个变量的子集, 已经采过值了
- 得到样本 x[m]=(X1, …, Xn)
估计概率:
其他函数的期望:
求的目标分布只是一部分变量 Y:
这个方法复杂度高,因为采每个变量的值复杂度是 O(log(Val|Xi)),每个n个变量样本就是 O(nlog(d)) d=max Val|Xi,总共 m 个样本:O(Mnlog(d))
Foward Sampling with Rejection
P(Y|E=e), 在采样过程中把 E≠e 的样本扔掉。
这会产生一个问题,如果 E ≠e 的概率很小,那就会扔掉大量的样本,造成浪费,为了解决这个问题就产生了 Likelihood weighting 的方法,来减少浪费。
Likelihood Weighting
虽然我们的目标是 P(Y|E=e),但是我们可以从先验 P(X)中得到 samples,然后用 Likelihood 加权,得到 weighting samples。
首先明确 X 是所有变量,Y 是目标变量,E 是观测变量
像 FS 一样也从 P(X)分布中采样,但是设 E=e,我们目标是 P(Y|e),这是 P(Y,e)的一小部分
采样过程中因为 E=e,所以e 的 CPD:
所以样本要用 加权
这样来看,其实 LW 和 FSwith rejection 是一样的本质,只不过是用加权来减去 rejection带来的计算损失
采一个样本 x[m]的过程:
- 定义变量的拓扑排序X1, …, Xn
- 如果变量 Xi 属于 E,直接设Xi 等于观测值 E[xi] 并且更新权值 wi:
- 如果变量 Xi 不属于 E,从概率 P(Xi|Pai)中采 Xi的值
- 得到样本 x[m]=(X1, …, Xn)
估计概率:
Importance Sampling
IS 的基本思想是不从分布 P 中采样,而是从另一个分布 Q 中采样。这么做的目的是因为分布 P 复杂,从更简单的分布 Q 来拟合 P 更容易
分布 P 被叫做 target distribution
分布 Q 叫做 proposal/sampling distribution
Unnormalized Importance Sampling
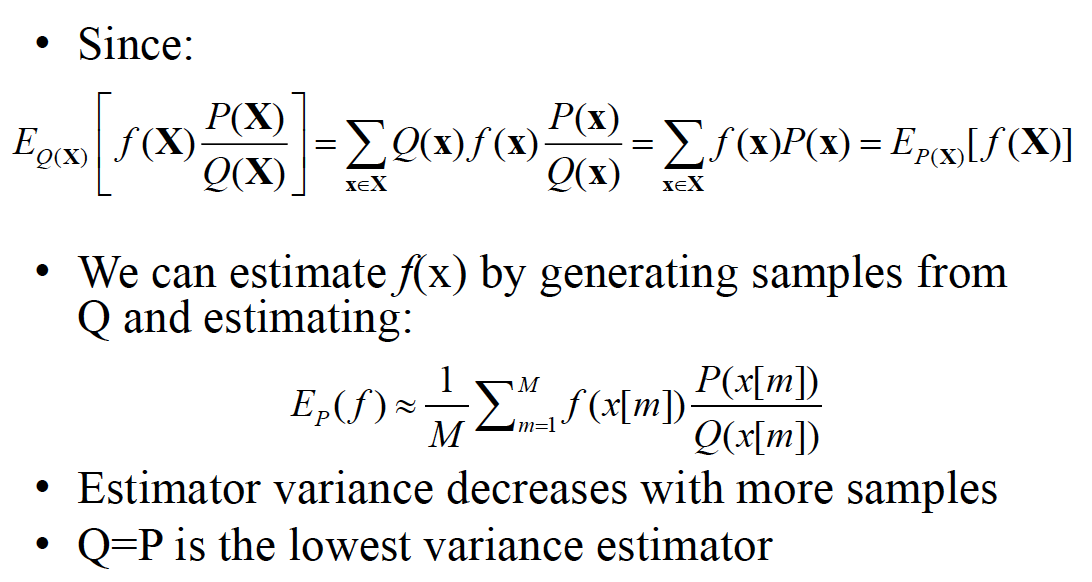
第一个公式左边是从 Q 分布中函数 采样的期望,右边是从分布 P 中函数 采样的期望
所以第二个公式,用 Q 分布中采样样本 x[m]来估计 P 分布。
Normalized Importance Sampling
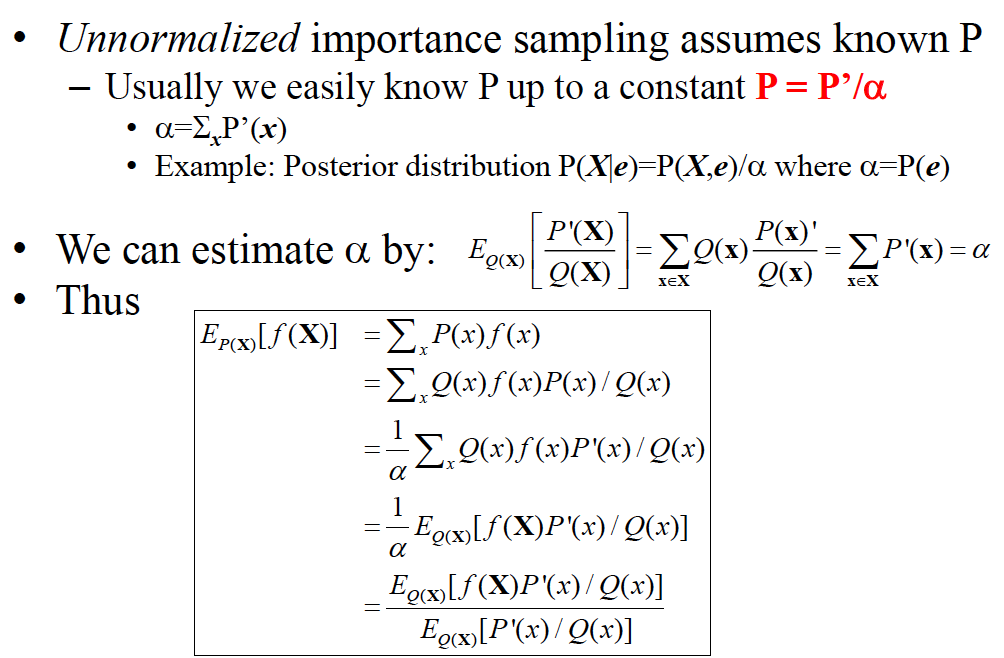
框起来的normalized 的式子,相对于unnormalized 差距在于:在分布 Q 的期望上也做了normalized
如果用 multilated network 做 Q 分布的图,最后计算出来的估计公式其实和LW 是一样一样的
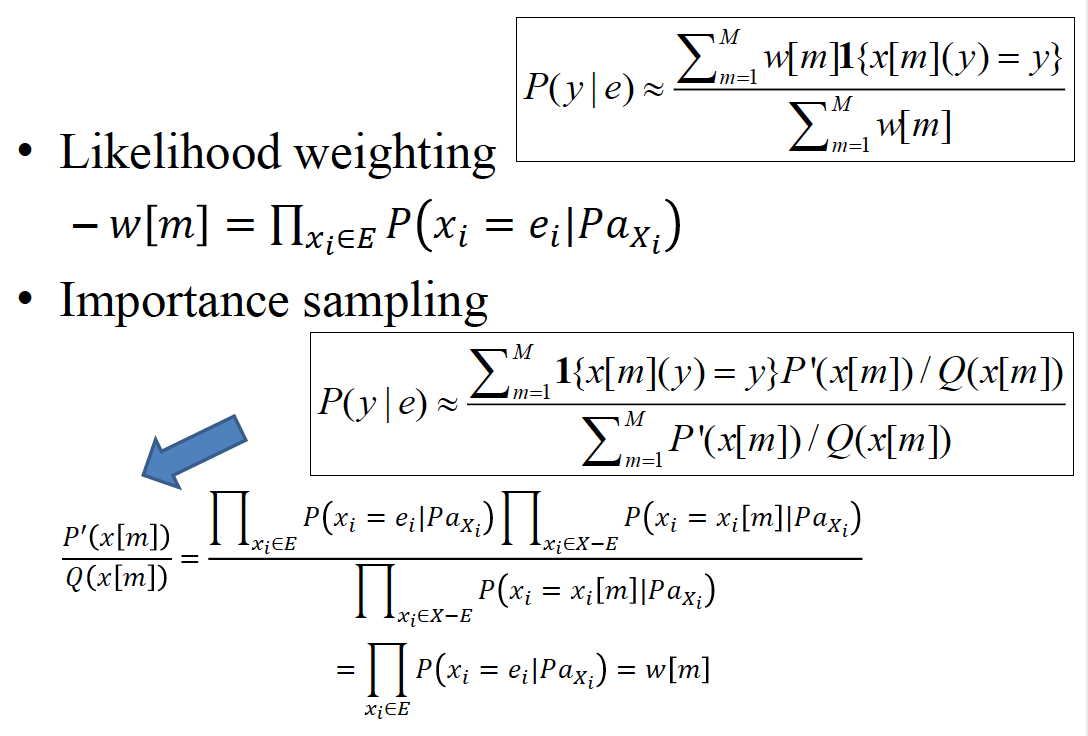
LW 不太适用于 MN,因为需要把 MN 转成 BN
IS 的缺点是对于复杂结构 P很难选好 Q,如果 P 和 Q 太不像,收敛速度会很慢
Markov Chain Monte Carlo
MCMC 方法基本思想就是去找到一个Markov Chain,使这个 Markov Chain 的稳态分布等于目标分布 P(Y|E=e)。这是基于一个很重要的定理:
Theorem: A finite state Markov chain T has a unique stationary distribution if and only if it is regular
regular:简单一点说就是任何一个状态到另一个状态都是 k 步可达
A Markov chain is regular if there is k such that for every x,x’ Val(X), the probability of getting from x to x’ in exactly k steps is greater than zero
对于 BN 的 regular:所有 CPD 严格大于0
对于 MN的 regular:所有 clique potential 严格大于 0
Gibbs Sampling
对 Markov Chain 的转移概率
全概率公式:
是的一个解
其中是 Markov Chain 的稳态概率分布,P(X=x)是目标概率分布
是唯一解吗?是的!因为刚才关于 MC regular 的定理。
采一个样本 x[m]的过程:
- 设 x[m]=x[m-1],并且确定一个变量更新顺序(刚才前面的直接是拓扑排序)
- 对于每个除了观测变量之外的变量 Xi:
- 设 , 可以简化到 Xi 的 Markov blanket
- 从采样得到采样值x[m](X_i)
- 得到样本 x[m]=(X1, …, Xn)
之前HMM 中学习中的 inference 是用的 Gibbs sampling 方法
Metropolis-Hastings Algorithm
这个可以看做是 Gibbs Sampling 的一个泛化方法,不是从 Markov Chain 的稳态分布来生成 samples,而是可以从任意的转移分布生成 samples。
定义了新的因子:acceptance probability 来决定是否接受一个转移 A(x—>x’)
当MC 处于稳态,互相转移概率应该是相等的:
得到 A(x—>x’)=min[1, ]
MH Algorithm for Continuous Probability
转移概率一般设为多变量的高斯分布
高斯转移概率可以看做是当前状态为中心的 random walk,此时转移概率是对称的,那么acceptance rate
(Hybrid) Hamitonian Monte Carlo
HMC 算法是利用物理系统中动力学的概念来计算Markov链中的未来状态,而不是概率分布。相比于随机游走,通过这种方式,能够更加高效的分析状态空间,从而达到更快的收敛。HMC 也算是 MH的一种算法。[TODO]
MCMC in practice
- 需要等burn in time 结束Markov Chain 才能进入稳态,之后的所有样本都来自稳态
- burn in time很难估计
- 没有理论保证稳态的存在
- 从相同链采样的 samples 是correlated,相关的。
所以采样的话最好是从多个链中分别采