Variables are Not Detectable
为什么变量是不能观测到的呢?因为变量可能是 hidden variables,不能被观测,只是一个概念,非真实存在。
HMM
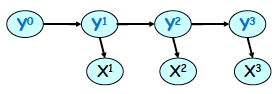
状态变量 y 不能被观测
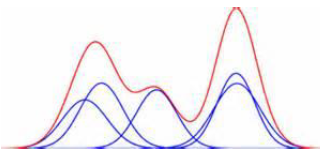
Gaussian Mixture Model
Missing Values and Data Outliers
缺失值和异常点,系统可能会没有检测到一些观测点。还有一些异常点。
Learning in Gaussian Mixture Models
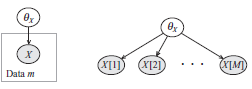
对一个MLE 框架下,已知数据 D={y[1],…,y[M]}
目标函数:$\underset{\theta}{\operatorname{arg max}} p(D|\theta)$
对于完整数据,MLE 学习是简单的,已知完整数据 Dc={(x[i], y[i])}~i=1…M~

E-step:
x的先验分布π~k~ = p(X=k): $\pi_k^*=\frac{M[x=k]}{M}$
M-step:
$\mu_k^*=\frac{1}{M[x=k]}\sum_m y[m] |_{x[m]=k}$
$\Sigma_k^=\frac{1}{M[x=k]}\sum_m (y[m]-\mu_k^)(y[m]-\mu_k^*)^T |_{x[m]=k}$
但是实际上X 是不知道的,只有 Y 被观测到。
如果我们知道参数θ,可以求得 X 的后验分布(这是 inference 过程)
将 x 的先验分布P(X)=π和 Y 的 likelihood P(Y|X=k)=N~k~^(t)^(Y)代入上式, 得到:
其中$N_k^{(y)}=\frac{1}{\sqrt{|2\pi \Sigma|}}exp{-\frac{1}{2}(y-\mu_k)^T\Sigma^{-1}(y-\mu_k)}$
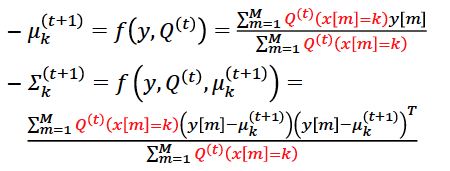
新一轮的 E 步迭代,使用 MLE 更新
计算$Q^{(t)}(x[m]=k)$, 代入下面式子
$\pi_k^{t+1}=\frac{1}{M}\sum_{m=1}^M Q^{(t)}(x[m]=k)$
新一轮的 M 步迭代: