Inference的定义:给定部分观察值E=e,求目标变量Y的概率 或者 (最大后验概率MAP)
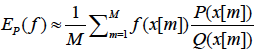
Particle-Based Approximate Inference (2018-12-22-PBAI/PBAI)最基本的想法是从目标分布中采样x[1], …, x[m],然后用采样数据去估计函数
2018-12-22-PBAI/PBAI的关键是如何从后验分布中采样
前向采样 Forward Sampling (FS)
从分布P(X)中利用Bayesian Network产生随机样本,使用
估计概率, 其中I(·)是指示函数
采样过程:
- 确定X~1~, … , X~n~的拓扑排序
- 按照拓扑顺序,对每个X~i~进行采样,采样概率,pa~i~的值都已经赋过值了
- 估计概率
从而可以估计任何期望
如果只需要估计变量X的子集Y,使用
采样开销
- 每个变量X~i~的开销:O(log(Val|X~i~)), 其中Val|X~i~是指变量X~i~的取值范围
- 每个sample的开销:
- M个sample的开销:
需要sample的数量
为了以概率, 达到相对误差,至少需要采样
如果P(y) ↓,则M↑,才能更精确地观测。
Forward Sampling with Rejection
因为是要在观测到一部分变量值e得情况下求目标变量Y的概率。用带拒绝的方式做采样,用前向采样采出的数据,如果E≠e,就把这个样本扔掉。从被接受的样本中去估计。
缺点/问题 如果p(e)=0.001,概率非常小,那么扔掉的样本会非常多,浪费很多样本资源。
似然采样 Likelihood Weighting (LW)
通过FS with rejection的问题,是否可以让所有的样本都满足E=e。
那么可以把在sample到观测变量X∈E时,直接设置为X=e。原来我们是从后验P(X|e)做sample,现在我们是直接从先验P(X)得到采样。
所以想从P’(X, e)中得到sample再归一化。
总结来说就是从先验分布P(X)得到样本,再用likelihood加权样本。
P(Y, e) = P(Y|e)P(e), 所以P(Y|e)是P(Y, e)的一部分
根据BN分解定理,
观察值给了定值, 所以每个采样值应该加上权值
和FS with rejection联系:采样可以看成有的概率被接受
采样过程
- 确定X~1~, … , X~n~的拓扑排序
- 对于每个变量X~i~(采M个样本) 如果X~i~∉E,直接从采样 如果X~i~∈E,设X~i~=E[x~i~],
- 得到w~i~,x[1], …, x[M]
- 估计概率
其中
重要性采样 Importance Sampling (IS)
估计一个和P相关的函数Q,从Q中采样。P是目标分布,Q是采样分布。
要求Q:P(x) > 0 → Q(x) > 0
Q不会漏掉P的任何一个非零概率的事件。
在实际中,如果Q和P越想似,采样的效果自然是更好。当Q=P时,得到最低的方差估计
最简单的Q是把P的BN上的边都去掉了,即每个变量都是完全独立的。
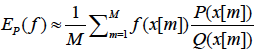
Unnormalized Importance Sampling

左半边是从Q做sampling,右半边是对P做sampling
所以从Q中Sample的数据可以用来近似P的采样
Normalized Importance Sampling
归一化P’,P=P’/α,
已知α:

因此可以推导出归一化的P和Q的采样估计
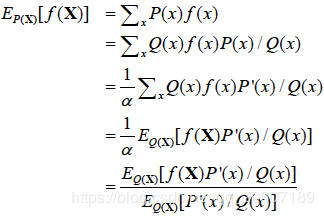
所以从Q中Sample的数据可以用来近似P的采样
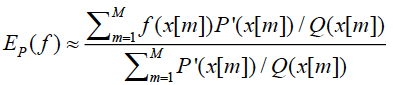
和刚才未归一化的做对比
Importance Sampling for Bayesian Networks
定义mutilated network(残支网络)G~E=e~:
- 节点X∈E没有parents
- 在节点X∈E的CPD中只有X=E[X]那一项概率为1,其余为0
- 其余节点不变
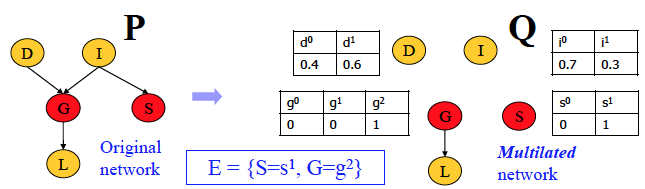
如果Q定义为mutilated network, 那么LW和IS是相同的采样公式
Likelihood Weighting:
其中
Importance Sampling
其中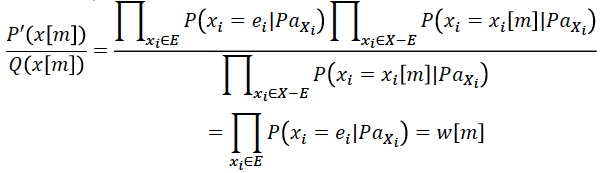
需要sample的数量
取决于P和Q的相似度
总结——LW和IS的不足
LW在Markov Network(MN)很低效,因为需要将MN转化为BN
IS在选择一个合适的Q上很难,如果Q和P太不像,收敛会很慢
蒙特卡洛方法 Markov Chain Monte Carlo Method(MCMC)
MCMC的基本想法是设计一个马氏链,其稳态分布是P(X|e),即我们要求的目标分布。所以从这个马氏链上的采样就会服从我们的目标分布。
通过马氏链的稳态分布来做inference。
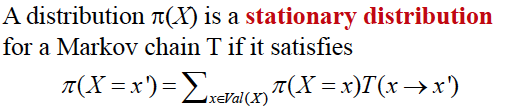
Markov Chain & Stationary Distribution
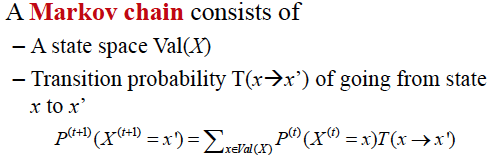
一个Markov Chain是regular需要满足链上所有的状态都是在有限k步内可达。
定理:一个有限状态的马氏链T有一个唯一的稳态分布 当且仅当 T是regular的。
Gibbs Sampling
怎么判断Gibbs-sampling MC是regular的呢?
- BN:所有的CPD严格为正
- MN:所有的clique potential严格为正
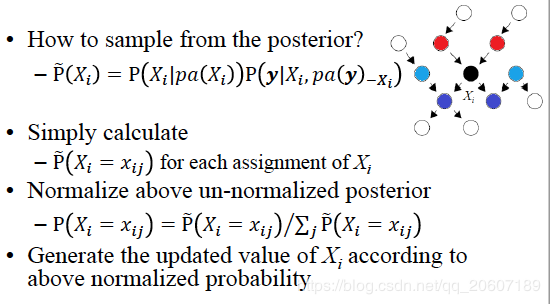
采样过程(一个样本)
- 设x[m]=x[m-1]且更换变量更新顺序(增加随机性)
- 对每个变量X~i~∈X-E:
- 设u~i~为Xi的Markov Blanket
- 从P(X~i~|u~i~)采样X~i~的新值
- 更新X~i~为采样值
- 得到x[m]
Gibbs Sampling for BNs
采样过程
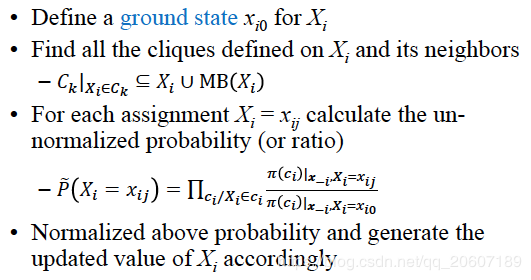
Gibbs Sampling for MNs
采样过程
Metropolis-Hastings Algorithm
Gibbs Sampling 给定一个当前状态 S,转移到下一个状态的转移概率是确定的,整个状态转移概率矩阵其实是确定的。
现在 MH algorithm 追求的是可以从任意一个转移分布中采到下一个样本。和 Importance sampling 有点像,可以从任意的函数 Q 中去拟合 P。
所以设计了一个新的因子:acceptance probability 接受概率。是指是否接受一个状态转移 A(x→x’)
现在的转移变成:
状态 x 转移到状态 x’:T(x→x’) = T^Q^(x→x’)A(x→x’)
状态 x 停留在原状态:T(x→x) = T^Q^(x→x) + T^Q^(x→x’)(1-A(x→x’))
上式第一项是原来的转移就是停留在原状态,第二项是指本来要转到其他状态,但是被拒绝了,只能留在原状态。
因为 MC 是稳态的,所以互相转移的概率是相等的。
从上式推出:重要!!!在结构学习的时候会使用到这个结论
在连续概率分布结论也是成立的。经常用到的是把转移概率分布设为多元高斯分布(可以看成是以当前状态为中心的随机游走)。那么此时的转移概率是对称的(随机游走过程),即T(x’→x)=T(x→x’)。
此时的 acceptance rate 只与稳态分布或者目标分布有关,即
MH algorithm 有个缺陷就是不同状态之间的转移太低效了,可能会产生很多 rejection。